Reducing Human Fall Injuries using a Mobile Manipulator
At the Positronics lab, we have been investigating using robots to help prevent falls and to help reduce injuries when falls do occur. We initially pursued this research using multi-rigid body simulation to avoid possible harm to humans during experimentation.
One of the surprising discoveries of our early research was the lack of a publicly available, computationally fast, human model. To address this gap, we developed a 20-DOF rigid body model (shown below) based on Dempster’s research on human body anthropometry. That study provides effective link lengths, 3-DOF joint limits, relative masses, and center-of-mass positions for links. We plan to release the source code for this model so that it can be used by other researchers.
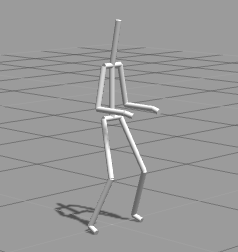
Screen capture of the humanoid in a standing configuration selected to show the joint locations and degrees of freedom.
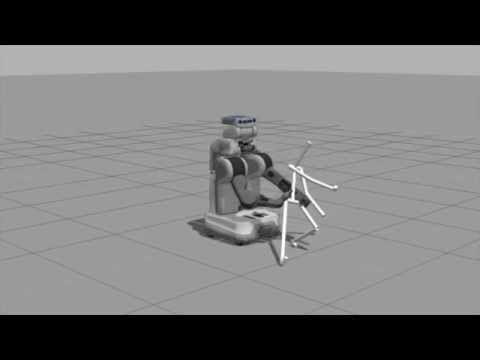
We next developed a series of scenarios to assess whether a mobile manipulator robot, the PR2, would be able to arrest the fall. Below is a video showing several trials of the humanoid falling alone, along with attempts by the robot to arrest the fall using one of these strategies:
 Relevant Research:
Joshua Lurz and Evan M. Drumwright. "Reducing Human Fall Injuries using a Mobile Manipulator". Proc. of the IEEE-RAS Intl. Conf. on Humanoid Robotics. Seoul, Korea, 2015. [pdf]
Relevant Research:
Joshua Lurz and Evan M. Drumwright. "Reducing Human Fall Injuries using a Mobile Manipulator". Proc. of the IEEE-RAS Intl. Conf. on Humanoid Robotics. Seoul, Korea, 2015. [pdf]