Defines an articulated body for use with reduced-coordinate dynamics algorithms. More...
#include <RCArticulatedBody.h>
Public Member Functions | |
| RCArticulatedBody () | |
| Default constructor. More... | |
| RCArticulatedBodyPtr | clone () const |
| Clones this. | |
| virtual void | load_from_xml (boost::shared_ptr< const XMLTree > node, std::map< std::string, BasePtr > &id_map) |
| Implements Base::load_from_xml() More... | |
| virtual void | save_to_xml (XMLTreePtr node, std::list< boost::shared_ptr< const Base > > &shared_objects) const |
| Implements Base::save_to_xml() | |
| virtual void | set_links_and_joints (const std::vector< RigidBodyPtr > &links, const std::vector< JointPtr > &joints) |
| Sets the vector of links and joints. | |
| virtual void | apply_generalized_impulse (const Ravelin::SharedVectorNd &gj) |
| Applies a generalized impulse to the rigid body (calls the simulator) | |
 Public Member Functions inherited from Moby::ArticulatedBody Public Member Functions inherited from Moby::ArticulatedBody | |
| virtual void | update_visualization () |
| Updates visualization for the body. | |
| void | update_joint_constraint_violations () |
| Updates joint constraint violation (after integration) | |
| bool | is_joint_constraint_violated () const |
| Checks for a joint constraint violation. | |
| virtual void | prepare_to_calc_ode (Ravelin::SharedConstVectorNd &x, double t, double dt, void *data) |
| Prepares to compute the ODE. | |
| virtual void | prepare_to_calc_ode_sustained_constraints (Ravelin::SharedConstVectorNd &x, double t, double dt, void *data) |
| Integrates a dynamic body. More... | |
| virtual void | ode (double t, double dt, void *data, Ravelin::SharedVectorNd &dx) |
| Returns the ODE's for position and velocity (concatenated into x) | |
| template<class OutputIterator > | |
| OutputIterator | find_limit_constraints (OutputIterator begin) const |
| Finds (joint) limit constraints. More... | |
| ArticulatedBodyPtr | get_this () |
| Gets shared pointer to this object as type ArticulatedBody. | |
|
boost::shared_ptr< const ArticulatedBody > | get_this () const |
| Gets shared pointer to this object as type const ArticulateBody. | |
| template<class OutputIterator > | |
| OutputIterator | find_limit_constraints (OutputIterator output_begin) const |
| Gets joint limit constraints. | |
| Public Member Functions inherited from Moby::ControlledBody | |
|
const std::list < RecurrentForcePtr > & | get_recurrent_forces () const |
| Gets the set of recurrent forces applied to this body. | |
| std::list< RecurrentForcePtr > & | get_recurrent_forces () |
| Gets the set of recurrent forces applied to this body. | |
| Public Member Functions inherited from Moby::Visualizable | |
| Visualizable (const Visualizable *v) | |
| void | set_visualization_relative_pose (const Ravelin::Pose3d &P) |
| Sets the visualization relative pose. | |
| virtual void | set_visualization_data (osg::Node *vdata) |
| Sets the visualization data from a node. | |
| virtual void | set_visualization_data (OSGGroupWrapperPtr vdata) |
| Sets the visualization data from a OSGGroupWrapper. | |
| osg::Group * | get_visualization_data () const |
| Gets the visualization data for this object. | |
|
boost::shared_ptr< const Ravelin::Pose3d > | get_visualization_pose () |
| Gets the pose for this visualizable object. | |
| Public Member Functions inherited from Moby::Base | |
| Base (const Base *b) | |
Protected Member Functions | |
| virtual void | compile () |
| Compiles this body (updates the link transforms and velocities) | |
Additional Inherited Members | |
| Static Public Member Functions inherited from Moby::Visualizable | |
| static osg::Group * | construct_from_node (boost::shared_ptr< const XMLTree > node, const std::map< std::string, BasePtr > &id_map) |
| Utility method for load_from_xml() More... | |
| Static Public Member Functions inherited from Moby::Base | |
| template<class T > | |
| static boost::shared_ptr< T > | clone (boost::shared_ptr< T > x) |
| Static method for cloning a shared pointer. | |
| Public Attributes inherited from Moby::ControlledBody | |
| Ravelin::VectorNd &(* | controller )(boost::shared_ptr< ControlledBody > body, Ravelin::VectorNd &, double, void *) |
| The controller callback, if any, for this body. | |
| void * | controller_arg |
| Argument to be passed to the controller. | |
| Public Attributes inherited from Moby::Base | |
| boost::shared_ptr< void > | userdata |
| Any relevant userdata. | |
| std::string | id |
| The unique ID for this object. | |
| Protected Attributes inherited from Moby::ControlledBody | |
| boost::weak_ptr< Simulator > | simulator |
| Pointer to the simulator (necessary for applying impulses w/constraints) | |
| Protected Attributes inherited from Moby::Visualizable | |
|
boost::shared_ptr < Ravelin::Pose3d > | _vF |
| The relative pose. | |
| OSGGroupWrapperPtr | _vizdata |
| The underlying visualization data. | |
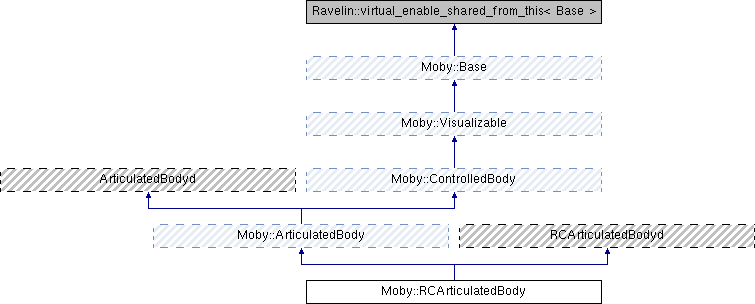
Detailed Description
Defines an articulated body for use with reduced-coordinate dynamics algorithms.
Reduced-coordinate articulated bodies cannot rely upon the integrator to automatically update the states (i.e., positions, velocities) of the links, as is done with maximal-coordinate articulated bodies. Rather, the integrator updates the joint positions and velocities; the states are obtained from this reduced-coordinate representation. Notes about concurrency:
It is generally desirable to be able to run forward dynamics and inverse dynamics algorithms concurrently to simulate actual robotic systems. In general, derived classes should not operate on state variables (joint positions, velocities, accelerations and floating base positions, velocites, and accelerations) directly during execution of the algorithm. Rather, derived classes should operate on copies of the state variables, updating the state variables on conclusion of the algorithms.
Constructor & Destructor Documentation
| RCArticulatedBody::RCArticulatedBody | ( | ) |
Default constructor.
Constructs a reduced-coordinate articulated body with no joints and no links.
Member Function Documentation
|
virtual |
Implements Base::load_from_xml()
- Precondition
- all links and joints must be loaded using their respective serialization methods before this method is called
Reimplemented from Moby::ArticulatedBody.
References Moby::XMLAttrib::get_bool_value(), Moby::XMLAttrib::get_origin_value(), and Moby::XMLAttrib::get_rpy_value().
The documentation for this class was generated from the following files:
- /home/drum/Moby/include/Moby/RCArticulatedBody.h
- /home/drum/Moby/src/RCArticulatedBody.cpp
