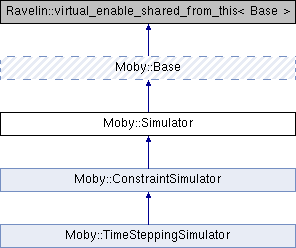
Simulator for both unarticulated and articulated rigid bodies without contact. More...
#include <Simulator.h>
Public Member Functions | |
| Simulator () | |
| Sets up the simulator. More... | |
| virtual double | step (double step_size) |
| Steps the Simulator forward in time without contact. More... | |
| ControlledBodyPtr | find_dynamic_body (const std::string &name) const |
| Finds the dynamic body in the simulator, if any. More... | |
| void | add_dynamic_body (ControlledBodyPtr body) |
| Adds a dynamic body to the simulator. More... | |
| void | remove_dynamic_body (ControlledBodyPtr body) |
| Removes a dynamic body from the simulator. | |
| void | update_visualization () |
| Updates all visualization under the simulator. | |
| virtual void | save_to_xml (XMLTreePtr node, std::list< boost::shared_ptr< const Base > > &shared_objects) const |
| Implements Base::save_to_xml() | |
| virtual void | load_from_xml (boost::shared_ptr< const XMLTree > node, std::map< std::string, BasePtr > &id_map) |
| Implements Base::load_from_xml() | |
| const std::vector < ControlledBodyPtr > & | get_dynamic_bodies () const |
| Gets the list of dynamic bodies in the simulator. More... | |
| void | add_transient_vdata (osg::Node *vdata) |
| Adds transient visualization data to the simulator. | |
| osg::Node * | get_persistent_vdata () const |
| Gets the persistent visualization data. | |
| osg::Node * | get_transient_vdata () const |
| Gets the transient (one-step) visualization data. | |
| template<class ForwardIterator > | |
| double | integrate (double dt, ForwardIterator begin, ForwardIterator end) |
| Integrates both position and velocity of rigid _bodies. More... | |
 Public Member Functions inherited from Moby::Base Public Member Functions inherited from Moby::Base | |
| Base (const Base *b) | |
Public Attributes | |
| double | current_time |
| The current simulation time. | |
| boost::shared_ptr< Dissipation > | dissipator |
| The dissipation mechanism for larger time steps. | |
| void(* | post_step_callback_fn )(Simulator *s) |
| Callback function after a step is completed. | |
| double | dynamics_time |
| User time spent by dynamics on the last step. | |
| std::vector< JointPtr > | implicit_joints |
| Set of implicit joints maintained in the simulation (does not include implicit joints belonging to RCArticulatedBody objects) | |
| Public Attributes inherited from Moby::Base | |
| boost::shared_ptr< void > | userdata |
| Any relevant userdata. | |
| std::string | id |
| The unique ID for this object. | |
Protected Member Functions | |
| void | apply_impulse (boost::shared_ptr< Ravelin::DynamicBodyd > db, const Ravelin::SharedVectorNd &gj) |
| Applies a generalized impulse to a dynamic body. More... | |
| void | solve (const std::vector< boost::shared_ptr< Ravelin::DynamicBodyd > > &island, const std::vector< JointPtr > &island_joints, const Ravelin::VectorNd &v, const Ravelin::VectorNd &f, double dt, Ravelin::VectorNd &a, Ravelin::VectorNd &lambda) const |
| virtual double | check_pairwise_constraint_violations (double t) |
| void | find_islands (std::vector< std::vector< boost::shared_ptr< Ravelin::DynamicBodyd > > > &islands) |
| Finds islands. | |
| unsigned | num_generalized_coordinates (const std::vector< boost::shared_ptr< Ravelin::DynamicBodyd > > &island) const |
| Gets the number of generalized coordinates in an island. | |
| void | calc_fwd_dyn (double dt) |
| Calculates forward dynamics for bodies (does not consider unilateral constraints) | |
| void | precalc_fwd_dyn () |
| Prepares to calculate forward dynamics for bodies. | |
| template<class ForwardIterator > | |
| double | integrate (double step_size, ForwardIterator begin, ForwardIterator end) |
| Integrates both position and velocity of rigid _bodies. More... | |
| double | integrate (double step_size) |
| Integrates all dynamic bodies. | |
Protected Attributes | |
| osg::Group * | _persistent_vdata |
| osg::Group * | _transient_vdata |
| std::vector< ControlledBodyPtr > | _bodies |
| The set of bodies in the simulation. | |
| Ravelin::VectorNd | _current_dx |
| The derivative at the current time. | |
Friends | |
| class | ConstraintStabilization |
| class | ImpactConstraintHandler |
| class | RigidBody |
| class | RCArticulatedBody |
Additional Inherited Members | |
| Static Public Member Functions inherited from Moby::Base | |
| template<class T > | |
| static boost::shared_ptr< T > | clone (boost::shared_ptr< T > x) |
| Static method for cloning a shared pointer. | |
Detailed Description
Simulator for both unarticulated and articulated rigid bodies without contact.
Class used for performing dynamics simulation of rigid bodies without contact. Rigid body simulation of articulated bodies is supported using both maximal and reduced coordinate approaches.
Constructor & Destructor Documentation
| Simulator::Simulator | ( | ) |
Sets up the simulator.
The simulator properties are set as follows:
- simulator time = 0
- no integrator
Member Function Documentation
| void Simulator::add_dynamic_body | ( | ControlledBodyPtr | body | ) |
Adds a dynamic body to the simulator.
- Precondition
- list of bodies is sorted
References Moby::Visualizable::get_visualization_data().
|
protected |
Applies a generalized impulse to a dynamic body.
This function takes implicit constraints into account.
| ControlledBodyPtr Simulator::find_dynamic_body | ( | const std::string & | name | ) | const |
Finds the dynamic body in the simulator, if any.
Searches unarticulated bodies, articulated bodies, and links of articulated bodies.
|
inline |
Gets the list of dynamic bodies in the simulator.
- Note
- if a dynamic body is articulated, only the articulated body is returned, not the links
References _bodies.
| double Moby::Simulator::integrate | ( | double | dt, |
| ForwardIterator | begin, | ||
| ForwardIterator | end | ||
| ) |
Integrates both position and velocity of rigid _bodies.
- Returns
- the size of step taken
|
protected |
Integrates both position and velocity of rigid _bodies.
- Returns
- the size of step taken
|
virtual |
Steps the Simulator forward in time without contact.
This pseudocode was inspired from [Baraff 1997] and [Mirtich 1996].
- Parameters
-
step_size the step size
- Returns
- step_size
Reimplemented in Moby::TimeSteppingSimulator.
The documentation for this class was generated from the following files:
- /home/drum/Moby/include/Moby/Simulator.h
- /home/drum/Moby/include/Moby/Simulator.inl
- /home/drum/Moby/src/Simulator.cpp
