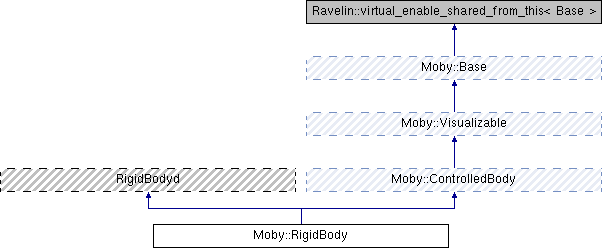
Represents a single rigid body. More...
#include <RigidBody.h>
Public Types | |
| enum | Compliance { eRigid, eCompliant } |
Public Member Functions | |
| RigidBody () | |
| Default constructor. More... | |
| virtual void | set_visualization_data (osg::Node *vdata) |
| Sets the visualization data from a node. | |
| virtual void | load_from_xml (boost::shared_ptr< const XMLTree > node, std::map< std::string, BasePtr > &id_map) |
| Implements Base::load_from_xml() | |
| virtual void | save_to_xml (XMLTreePtr node, std::list< boost::shared_ptr< const Base > > &shared_objects) const |
| Implements Base::save_to_xml() | |
| bool | is_child_link (boost::shared_ptr< const RigidBody > query) const |
| Determines whether the given link is a child link of this. | |
| bool | is_descendant_link (boost::shared_ptr< const RigidBody > query) const |
| Determines whether the given link is a descendant of this. More... | |
| RigidBodyPtr | get_parent_link () const |
| Gets the first parent link of this link; returns NULL if there is no parent. | |
| JointPtr | get_inner_joint_explicit () const |
| Gets the explicit inner joint of this link; returns NULL if there is no explicit inner joint. More... | |
| virtual void | prepare_to_calc_ode (Ravelin::SharedConstVectorNd &x, double t, double dt, void *data) |
| Prepares to compute the ODE. | |
| virtual void | prepare_to_calc_ode_sustained_constraints (Ravelin::SharedConstVectorNd &x, double t, double dt, void *data) |
| Prepares to compute the derivative of the body (sustained constraints) | |
| virtual void | ode (double t, double dt, void *data, Ravelin::SharedVectorNd &dx) |
| Computes the ODE. | |
| virtual void | set_articulated_body (boost::shared_ptr< ArticulatedBody > body) |
| Sets the articulated body corresponding to this body. More... | |
| virtual void | set_inertia (const Ravelin::SpatialRBInertiad &J) |
| Sets the rigid body inertia for this body. | |
| virtual void | apply_generalized_impulse (const Ravelin::SharedVectorNd &gj) |
| Applies a generalized impulse to the rigid body (calls the simulator) | |
| template<class OutputIterator > | |
| OutputIterator | get_parent_links (OutputIterator begin) const |
| template<class OutputIterator > | |
| OutputIterator | get_child_links (OutputIterator begin) const |
| template<class OutputIterator > | |
| OutputIterator | get_parent_links (OutputIterator begin) const |
| template<class OutputIterator > | |
| OutputIterator | get_child_links (OutputIterator begin) const |
 Public Member Functions inherited from Moby::ControlledBody Public Member Functions inherited from Moby::ControlledBody | |
|
const std::list < RecurrentForcePtr > & | get_recurrent_forces () const |
| Gets the set of recurrent forces applied to this body. | |
| std::list< RecurrentForcePtr > & | get_recurrent_forces () |
| Gets the set of recurrent forces applied to this body. | |
| Public Member Functions inherited from Moby::Visualizable | |
| Visualizable (const Visualizable *v) | |
| virtual void | update_visualization () |
| Updates the visualization using the appropriate transform. More... | |
| void | set_visualization_relative_pose (const Ravelin::Pose3d &P) |
| Sets the visualization relative pose. | |
| virtual void | set_visualization_data (OSGGroupWrapperPtr vdata) |
| Sets the visualization data from a OSGGroupWrapper. | |
| osg::Group * | get_visualization_data () const |
| Gets the visualization data for this object. | |
|
boost::shared_ptr< const Ravelin::Pose3d > | get_visualization_pose () |
| Gets the pose for this visualizable object. | |
| Public Member Functions inherited from Moby::Base | |
| Base (const Base *b) | |
Public Attributes | |
| std::list< CollisionGeometryPtr > | geometries |
| Collision geometries, if any, for this rigid body. | |
| Compliance | compliance |
| Compliance value, determines event type. | |
| Public Attributes inherited from Moby::ControlledBody | |
| Ravelin::VectorNd &(* | controller )(boost::shared_ptr< ControlledBody > body, Ravelin::VectorNd &, double, void *) |
| The controller callback, if any, for this body. | |
| void * | controller_arg |
| Argument to be passed to the controller. | |
| Public Attributes inherited from Moby::Base | |
| boost::shared_ptr< void > | userdata |
| Any relevant userdata. | |
| std::string | id |
| The unique ID for this object. | |
Friends | |
| class | ArticulatedBody |
| class | RCArticulatedBody |
| class | MCArticulatedBody |
| class | TimeSteppingSimulator |
| class | Joint |
Additional Inherited Members | |
| Static Public Member Functions inherited from Moby::Visualizable | |
| static osg::Group * | construct_from_node (boost::shared_ptr< const XMLTree > node, const std::map< std::string, BasePtr > &id_map) |
| Utility method for load_from_xml() More... | |
| Static Public Member Functions inherited from Moby::Base | |
| template<class T > | |
| static boost::shared_ptr< T > | clone (boost::shared_ptr< T > x) |
| Static method for cloning a shared pointer. | |
| Protected Attributes inherited from Moby::ControlledBody | |
| boost::weak_ptr< Simulator > | simulator |
| Pointer to the simulator (necessary for applying impulses w/constraints) | |
| Protected Attributes inherited from Moby::Visualizable | |
|
boost::shared_ptr < Ravelin::Pose3d > | _vF |
| The relative pose. | |
| OSGGroupWrapperPtr | _vizdata |
| The underlying visualization data. | |
Detailed Description
Represents a single rigid body.
Contains information needed to represent a rigid body, including position and velocity (both linear and angular), mass, center of mass, inertia matrix, collision data, and visualization data. This class is used for both non-articulated and articulated rigid bodies, though not all member data may be used in the latter.
- Todo:
- implement rest matrix
Constructor & Destructor Documentation
| RigidBody::RigidBody | ( | ) |
Default constructor.
Constructs a rigid body with zero mass, zero inertia tensor, and center of mass at [0,0,0] with position at [0,0,0], identity orientation, and zero linear and angular velocity. Body is enabled by default.
Member Function Documentation
| JointPtr RigidBody::get_inner_joint_explicit | ( | ) | const |
Gets the explicit inner joint of this link; returns NULL if there is no explicit inner joint.
Throws an exception if this link has multiple explicit inner joints
| bool RigidBody::is_descendant_link | ( | boost::shared_ptr< const RigidBody > | query | ) | const |
Determines whether the given link is a descendant of this.
- Note
- returns true if query == this
|
virtual |
Sets the articulated body corresponding to this body.
- Parameters
-
body a pointer to the articulated body or NULL if this body is not a link in an articulated body
The documentation for this class was generated from the following files:
- /home/drum/Moby/include/Moby/RigidBody.h
- /home/drum/Moby/include/Moby/RigidBody.inl
- /home/drum/Moby/src/RigidBody.cpp
