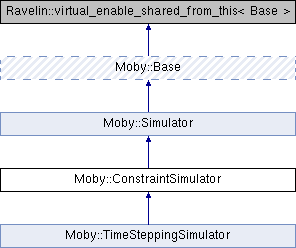
An virtual class for simulation with constraints. More...
#include <ConstraintSimulator.h>
Public Member Functions | |
| ConstraintSimulator () | |
| Default constructor. | |
| virtual void | load_from_xml (boost::shared_ptr< const XMLTree > node, std::map< std::string, BasePtr > &id_map) |
| Implements Base::load_from_xml() | |
| virtual void | save_to_xml (XMLTreePtr node, std::list< boost::shared_ptr< const Base > > &shared_objects) const |
| Implements Base::save_to_xml() | |
| boost::shared_ptr < ContactParameters > | get_contact_parameters (CollisionGeometryPtr geom1, CollisionGeometryPtr geom2) const |
| Gets the contact data between a pair of geometries (if any) More... | |
|
const std::vector < PairwiseDistInfo > & | get_pairwise_distances () const |
|
std::vector < UnilateralConstraint > & | get_compliant_constraints () |
| Gets the (sorted) compliant constraint data. | |
|
std::vector < UnilateralConstraint > & | get_rigid_constraints () |
| Gets the (sorted) rigid constraint data. | |
|
boost::shared_ptr < CollisionDetection > | get_collision_detection () const |
| Gets the collision detection mechanism. | |
 Public Member Functions inherited from Moby::Simulator Public Member Functions inherited from Moby::Simulator | |
| Simulator () | |
| Sets up the simulator. More... | |
| virtual double | step (double step_size) |
| Steps the Simulator forward in time without contact. More... | |
| ControlledBodyPtr | find_dynamic_body (const std::string &name) const |
| Finds the dynamic body in the simulator, if any. More... | |
| void | add_dynamic_body (ControlledBodyPtr body) |
| Adds a dynamic body to the simulator. More... | |
| void | remove_dynamic_body (ControlledBodyPtr body) |
| Removes a dynamic body from the simulator. | |
| void | update_visualization () |
| Updates all visualization under the simulator. | |
| const std::vector < ControlledBodyPtr > & | get_dynamic_bodies () const |
| Gets the list of dynamic bodies in the simulator. More... | |
| void | add_transient_vdata (osg::Node *vdata) |
| Adds transient visualization data to the simulator. | |
| osg::Node * | get_persistent_vdata () const |
| Gets the persistent visualization data. | |
| osg::Node * | get_transient_vdata () const |
| Gets the transient (one-step) visualization data. | |
| template<class ForwardIterator > | |
| double | integrate (double dt, ForwardIterator begin, ForwardIterator end) |
| Integrates both position and velocity of rigid _bodies. More... | |
| Public Member Functions inherited from Moby::Base | |
| Base (const Base *b) | |
Public Attributes | |
| ConstraintStabilization | cstab |
| The constraint stabilization mechanism. | |
|
std::set< Ravelin::sorted_pair < CollisionGeometryPtr > > | unchecked_pairs |
| Determines whether two geometries are not checked. | |
|
std::vector< std::pair < ControlledBodyPtr, Ravelin::VectorNd > > | _x0 |
| Vectors set and passed to collision detection. | |
|
std::vector< std::pair < ControlledBodyPtr, Ravelin::VectorNd > > | _x1 |
|
boost::shared_ptr < ContactParameters >(* | get_contact_parameters_callback_fn )(CollisionGeometryPtr g1, CollisionGeometryPtr g2) |
| Callback function for getting contact parameters. | |
| void(* | post_mini_step_callback_fn )(ConstraintSimulator *s) |
| Callback function after a mini-step is completed. | |
| void(* | constraint_callback_fn )(std::vector< UnilateralConstraint > &, boost::shared_ptr< void >) |
| The callback function (called when constraints have been determined) More... | |
| void(* | constraint_post_callback_fn )(const std::vector< UnilateralConstraint > &, boost::shared_ptr< void >) |
| The callback function (called after forces/impulses are applied) | |
| boost::shared_ptr< void > | constraint_callback_data |
| Data passed to unilateral constraint callback. | |
| boost::shared_ptr< void > | constraint_post_callback_data |
| Data passed to post-constraint callback. | |
|
std::map< Ravelin::sorted_pair < BasePtr >, boost::shared_ptr < ContactParameters > > | contact_params |
| Mapping from objects to contact parameters. | |
| bool | render_contact_points |
| If set to 'true' simulator will process contact points for rendering. | |
| Public Attributes inherited from Moby::Simulator | |
| double | current_time |
| The current simulation time. | |
| boost::shared_ptr< Dissipation > | dissipator |
| The dissipation mechanism for larger time steps. | |
| void(* | post_step_callback_fn )(Simulator *s) |
| Callback function after a step is completed. | |
| double | dynamics_time |
| User time spent by dynamics on the last step. | |
| std::vector< JointPtr > | implicit_joints |
| Set of implicit joints maintained in the simulation (does not include implicit joints belonging to RCArticulatedBody objects) | |
| Public Attributes inherited from Moby::Base | |
| boost::shared_ptr< void > | userdata |
| Any relevant userdata. | |
| std::string | id |
| The unique ID for this object. | |
Protected Member Functions | |
| void | calc_impacting_unilateral_constraint_forces (double dt) |
| Handles constraints. | |
| void | find_unilateral_constraints () |
| Finds the set of unilateral constraints. | |
| void | calc_compliant_unilateral_constraint_forces () |
| Computes compliant contact forces. | |
| void | preprocess_constraint (UnilateralConstraint &e) |
| Performs necessary preprocessing on an constraint. | |
| void | determine_geometries () |
| Sets up the list of collision geometries. | |
| void | broad_phase (double dt) |
| Does broad phase collision detection, identifying which pairs of geometries may come into contact over time step of dt. | |
| void | calc_pairwise_distances () |
| Computes pairwise distances of geometries at their current poses, using broad phase results to determine which pairs should be checked. More... | |
| void | visualize_contact (UnilateralConstraint &constraint) |
| Draws a ray directed from a contact point along the contact normal. | |
| double | calc_CA_step () |
| double | calc_next_CA_Euler_step (double contact_dist_thresh) const |
| Protected Member Functions inherited from Moby::Simulator | |
| void | apply_impulse (boost::shared_ptr< Ravelin::DynamicBodyd > db, const Ravelin::SharedVectorNd &gj) |
| Applies a generalized impulse to a dynamic body. More... | |
| void | solve (const std::vector< boost::shared_ptr< Ravelin::DynamicBodyd > > &island, const std::vector< JointPtr > &island_joints, const Ravelin::VectorNd &v, const Ravelin::VectorNd &f, double dt, Ravelin::VectorNd &a, Ravelin::VectorNd &lambda) const |
| virtual double | check_pairwise_constraint_violations (double t) |
| void | find_islands (std::vector< std::vector< boost::shared_ptr< Ravelin::DynamicBodyd > > > &islands) |
| Finds islands. | |
| unsigned | num_generalized_coordinates (const std::vector< boost::shared_ptr< Ravelin::DynamicBodyd > > &island) const |
| Gets the number of generalized coordinates in an island. | |
| void | calc_fwd_dyn (double dt) |
| Calculates forward dynamics for bodies (does not consider unilateral constraints) | |
| void | precalc_fwd_dyn () |
| Prepares to calculate forward dynamics for bodies. | |
| template<class ForwardIterator > | |
| double | integrate (double step_size, ForwardIterator begin, ForwardIterator end) |
| Integrates both position and velocity of rigid _bodies. More... | |
| double | integrate (double step_size) |
| Integrates all dynamic bodies. | |
Protected Attributes | |
| ImpactConstraintHandler | _impact_constraint_handler |
| Object for handling impact constraints. | |
| PenaltyConstraintHandler | _penalty_constraint_handler |
| Object for handling penalty constraints. | |
| std::vector< UnilateralConstraint > | _rigid_constraints |
| The vector of rigid constraints. | |
| std::vector< UnilateralConstraint > | _compliant_constraints |
| The vector of compliant constraints. | |
| std::vector< PairwiseDistInfo > | _pairwise_distances |
| Pairwise distances at bodies' current configurations. | |
| Ravelin::VectorNd | _workV |
| Work vector. | |
|
boost::shared_ptr < CollisionDetection > | _coldet |
| The collision detection mechanism. | |
| std::vector< CollisionGeometryPtr > | _geometries |
| The geometries in the simulator. | |
|
std::vector< std::pair < CollisionGeometryPtr, CollisionGeometryPtr > > | _pairs_to_check |
| Geometric pairs that should be checked for unilateral constraints (according to broad phase collision detection) | |
| Protected Attributes inherited from Moby::Simulator | |
| osg::Group * | _persistent_vdata |
| osg::Group * | _transient_vdata |
| std::vector< ControlledBodyPtr > | _bodies |
| The set of bodies in the simulation. | |
| Ravelin::VectorNd | _current_dx |
| The derivative at the current time. | |
Friends | |
| class | CollisionDetection |
| class | ConstraintStabilization |
Additional Inherited Members | |
| Static Public Member Functions inherited from Moby::Base | |
| template<class T > | |
| static boost::shared_ptr< T > | clone (boost::shared_ptr< T > x) |
| Static method for cloning a shared pointer. | |
Detailed Description
An virtual class for simulation with constraints.
Member Function Documentation
|
protected |
Computes pairwise distances of geometries at their current poses, using broad phase results to determine which pairs should be checked.
- Parameters
-
pairwise_distances on return, contains the pairwise distances
| shared_ptr< ContactParameters > ConstraintSimulator::get_contact_parameters | ( | CollisionGeometryPtr | geom1, |
| CollisionGeometryPtr | geom2 | ||
| ) | const |
Gets the contact data between a pair of geometries (if any)
This method looks for contact data not only between the pair of geometries, but also the rigid bodies that the geometries belong to, and any articulated bodies as well. The search proceeds in the following manner:
- two collision geometries
- one collision geometry, one rigid body
- two rigid bodies
- one collision geometry, one articulated body
- one rigid body, one articulated body
- two articulated bodies
The search order allows for multiple granularities; for example, a collision can easily be specified between two geometries of two of a robot's links (i.e., representing different surfaces on the links), between two links, or between two robots.
- Parameters
-
g1 the first collision geometry g2 the second collision geometry
- Returns
- a pointer to the contact data, if any, found
Member Data Documentation
| void(* Moby::ConstraintSimulator::constraint_callback_fn)(std::vector< UnilateralConstraint > &, boost::shared_ptr< void >) |
The callback function (called when constraints have been determined)
The callback function can remove constraints from the list, which will disable their processing (however, doing so may prevent the simulation from making progress, as the simulator attempts to disallow violations.
The documentation for this class was generated from the following files:
- /home/drum/Moby/include/Moby/ConstraintSimulator.h
- /home/drum/Moby/src/ConstraintSimulator.cpp
